torch_study_2
"/home/yossef/notes/personal/ml/torch_study/torch_study_2.md"
path: personal/ml/torch_study/torch_study_2.md
- **fileName**: torch_study_2
- **Created on**: 2026-04-02 19:00:36
import torch
import torch.nn as nn
import torch.optim as optim
import sys; sys.path.append('assets/scripts'); import helper_utils
so now gone try too train the new the model that gone understand the non linear data relation
so gone using relu activation function for adding non-linearity for
the model and train on the bike and cars data for distances, and
time
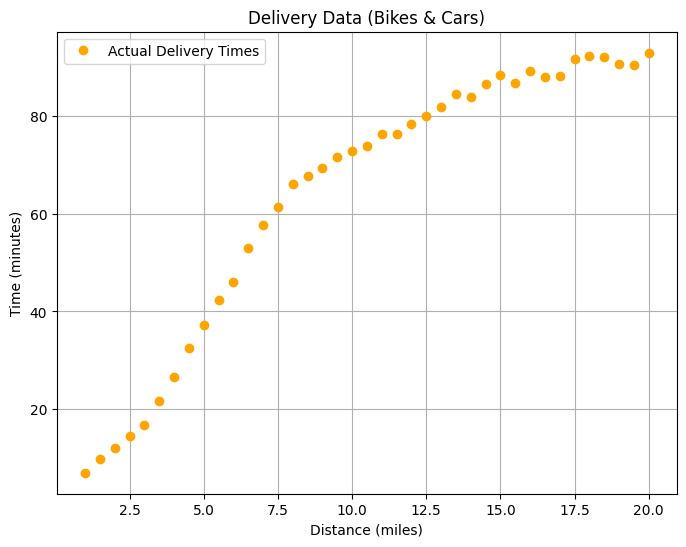
## creating the data
## THIS IS FORMATED DATA ON REALL WORLD NO WAY THIS GONE hAPPEND
distances = torch.tensor([
[1.0], [1.5], [2.0], [2.5], [3.0], [3.5], [4.0], [4.5], [5.0], [5.5],
[6.0], [6.5], [7.0], [7.5], [8.0], [8.5], [9.0], [9.5], [10.0], [10.5],
[11.0], [11.5], [12.0], [12.5], [13.0], [13.5], [14.0], [14.5], [15.0], [15.5],
[16.0], [16.5], [17.0], [17.5], [18.0], [18.5], [19.0], [19.5], [20.0]
], dtype=torch.float)
times = torch.tensor([
[6.96], [9.67], [12.11], [14.56], [16.77], [21.7], [26.52], [32.47], [37.15], [42.35],
[46.1], [52.98], [57.76], [61.29], [66.15], [67.63], [69.45], [71.57], [72.8], [73.88],
[76.34], [76.38], [78.34], [80.07], [81.86], [84.45], [83.98], [86.55], [88.33], [86.83],
[89.24], [88.11], [88.16], [91.77], [92.27], [92.13], [90.73], [90.39], [92.98]
], dtype=torch.float)
helper_utils.plot_data(distances, times)
so what is the normalization (z-scores, standardization) process
-
the algorhtim that is train the model using making a little
mistakes that making making the tarin process a little longer on time
so u needed too fix this so what is the mistake first : ( the
algorhtim is based zero so what this mean => it's looking at the data
that we have and check for what is more based on zero so on our case
there is distances and times distances range is (0, 5000), and time
(0, 200) so for this it's gone think that the distances is more
important on decision making and gone be a little bias on the start so
it's gone on the end learn the right way but gone be on more time and
more resources beacuse the bias on the start) -
too solve this soo u making operation name normlization which is
meaning making the values on small range so for example distances
range between (1, 2) time range (-1 , 1) so the value is too small so
the model not gone making any bias too any features at all
so the bias is when it's gone change the value for weight and bias for the model
distances_mean = distances.mean()
distances_std = distances.std()
print(f"the mean for distances: {distances_mean}")
print(f"the std for distances: {distances_std}")
the mean for distances: 10.5 the std for distances: 5.7008771896362305
times_mean = times.mean()
times_std = times.std()
print(f"the mean for times: {times_mean}")
print(f"the std for times: {times_std}")
the mean for times: 64.07128143310547 the std for times:
27.938106536865234
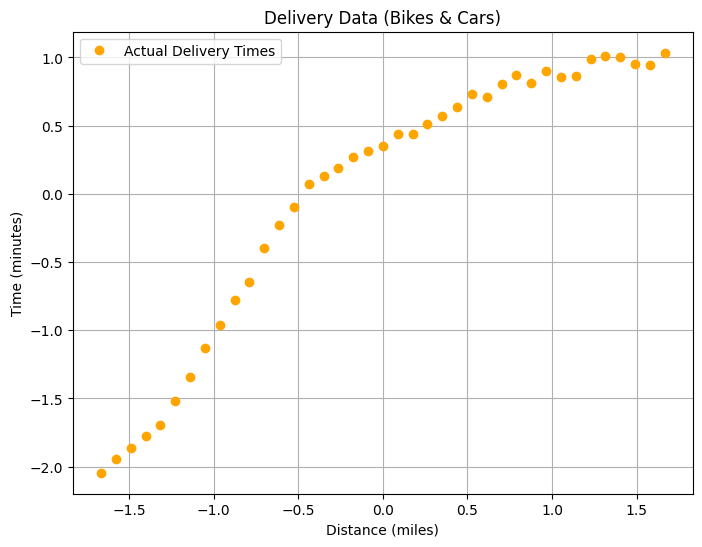
# using z-score method
distances_norm = (distances - distances_mean) / distances_std
times_norm = (times - times_mean) / times_std
print(f"the distances norm {distances_norm[:5]}")
print(f"the times norm {times_norm[:5]}")
the distances norm tensor([[-1.6664], [-1.5787], [-1.4910], [-1.4033],
[-1.3156]]) the times norm tensor([[-2.0442], [-1.9472], [-1.8599],
[-1.7722], [-1.6931]])
helper_utils.plot_data(distances_norm, times_norm)
building the model
- making 3 hidden layer (1,3) 2. apply the activation function for
adding nonlinearity for all the hiddden layers 3 that important step
that allow the model learn curves lines not stright line 3. the output
layer (3, 1)
hint : the output layer how indentiy it's numbers input and output (3, 1) 3 input values, one output value
soo too know how too setup this layer easyyyyyyyyyyyyyyyyy check the before hidden layer
# stop the random start for model (weight and bias)
torch.manual_seed(42)
model = nn.Sequential(
nn.Linear(1, 3),
nn.ReLU(),
nn.Linear(3,1)
)
##### trainning making the loss function and optim
loss_fn = nn.MSELoss()
optimizer = optim.SGD(model.parameters(), lr=0.01)
# Training loop
for epoch in range(3000):
# Reset the optimizer's gradients
optimizer.zero_grad()
# Make predictions (forward pass)
outputs = model(distances_norm)
# Calculate the loss
loss = loss_fn(outputs, times_norm)
# Calculate adjustments (backward pass)
loss.backward()
# Update the model's parameters
optimizer.step()
# Create a live plot every 50 epochs
if (epoch + 1) % 50 == 0:
helper_utils.plot_training_progress(
epoch=epoch,
loss=loss,
model=model,
distances_norm=distances_norm,
times_norm=times_norm
)
print("\nTraining Complete.")
print(f"\nFinal Loss: {loss.item()}")
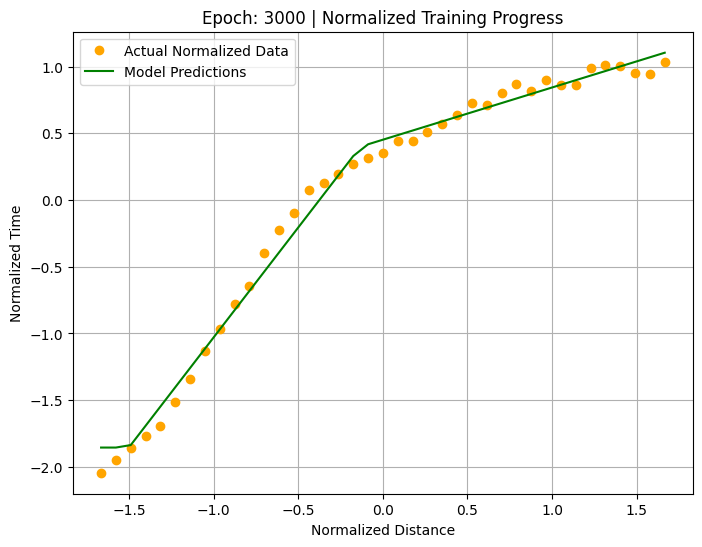
Training Complete.
Final Loss: 0.00779527286067605
helper_utils.plot_final_fit(model, distances, times, distances_norm, times_std, times_mean)
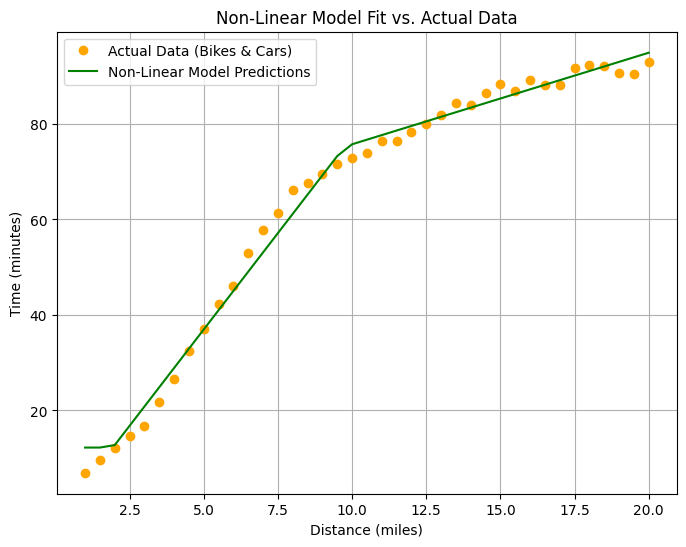
so now we making the first model that handle non-linearity data and plot the views for this datas
what about the predicetion
want too test this model
- we gone have the data for example new_distance = 20
hint we must doing normlization process again
why this ??? because we train the model on norimllization data
so now we gone norimalize the data and then passing too the model and
after that (model preduce => output data) gone be norimlized data so u
gone return back too normal format that is distance = 20
using the same normlization method that weeee used on the train
## making the process for preduction is less using resources and time
## because on train the algothim taking too much time and resources so
## we tell him this prediction not train so no needed for all the process
## that not gone be needed
with torch.no_grad():
# creating the tensor for prediction distance
pred_distance = torch.tensor([5.1], dtype=torch.float)
# normlization process
pred_distance_norm = (pred_distance - distances_mean) / distances_std
# denormlization process
# (pred_distance - distances_mean) = (pred_distance_norm / distances_std)
# pred_distance = (pred_distance_norm / distances_std) + distances_mean
# get the value from the model (and return time)
new_output = model(pred_distance_norm)
new_output_real = (new_output * times_std) + times_mean
# getting the acctually data from the normlization data
print(f"the distance prediction : {pred_distance}, distance norm: {pred_distance_norm}")
print(f"the time prediction : {new_output_real}, time norm: {new_output}")
the distance prediction : tensor([5.1000]), distance norm:
tensor([-0.9472]) the time prediction : tensor([37.7663]), time norm:
tensor([-0.9415])
# --- Decision Making Logic ---
print(f"Prediction for a {pred_distance}-mile delivery: {new_output_real.item():.1f} minutes")
# First, check if the delivery is possible within the 45-minute timeframe
if new_output_real.item() > 45:
print("\nDecision: Do NOT promise the delivery in under 45 minutes.")
else:
# If it is possible, then determine the vehicle based on the distance
if new_output_real <= 3:
print(f"\nDecision: Yes, delivery is possible. Since the distance is {pred_distance} miles (<= 3 miles), use a bike.")
else:
print(f"\nDecision: Yes, delivery is possible. Since the distance is {pred_distance} miles (> 3 miles), use a car.")
Prediction for a tensor([5.1000])-mile delivery: 37.8 minutes
Decision: Yes, delivery is possible. Since the distance is
tensor([5.1000]) miles (> 3 miles), use a car.
before:torch_study_1
continue:torch_study_3